It’s been almost two years since I did (or at least started) this project but I never sat down to document it. That’s what I want to do today. As the title says it’s about a little robot based on a RaspberryPi. Like many of its kind it is driven by a pair of stepper motors each driving a wheel directly attached to the respective motor axis. At the back there is another smaller, pivotable wheel to keep the robot in balance.
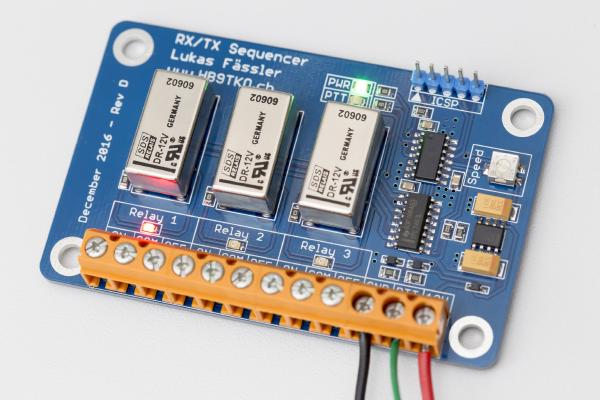
Much like the beacon keyer presented here earlier, this RX/TX sequencer is a simple but useful little device. Its typical use is in ham radio applications when a separate power amplifier (PA) and/or a sensitive low-noise pre-amplifier (LNA) is used. Care has then to be take to safely transition between RX and TX states - and that’s where this sequencer comes in.
If you’ve read my last post you’re already familiar with my Inductance Meter project: /posts/stand-alone-inductance-meter/. At that time the hardware was ready but there was no software yet. That’s been corrected, the inductance meter is now fully functional.
I regularly use PIC microcontrollers. I’ve tried some Atmel chips lately but I’m still by far most familiar with the PIC16 & PIC18 chip families. As you can see in my other posts, I tend to use SMD components but once in a while I need to program a DIP package.