It’s been almost two years since I did (or at least started) this project but I never sat down to document it. That’s what I want to do today. As the title says it’s about a little robot based on a RaspberryPi. Like many of its kind it is driven by a pair of stepper motors each driving a wheel directly attached to the respective motor axis. At the back there is another smaller, pivotable wheel to keep the robot in balance.
Over the last year or so I’ve designed, built and tested a standalone solar charger. It performed quite well but as with any complex design there were a number of things that needed to be improved. So I eventually reached the point where I decided to design a revised version. And this is what this post is all about.
In my last post of this series I’ve looked at different transducers and finally decided on a entirely waterproof 14mm model. The much lower signal level from those kind of transducers makes it necessary to reduce the distance between the transducers in order to still receive a reasonable signal amplitude. So I took my previous lasercut design and reduced it in size so that the distance between the transducers is only 120mm. I went to the local FabLab and and lasered two copies of the downsized design.
It’s time to follow up on the MPPT Solar Charger project. Progress has been slow since I’m currently working full time and doing a master’s degree at the same time. Given that this blog has previously been something close to a 50% job at times things will necessarily slow down a bit. But all the projects, including this one and the ultrasonic anemometer are alive and well and I’m working on them whenever I find some time.
I last time proudly presented the new RevB board and got a lot of feedback from people who want one, too. As mentioned I have all the components here to ship up to 10 kits but I was reluctant to send anything until I had the chance to do some hardware testing. Not much had changed since the last revision but I don’t like taking chances on things like this.
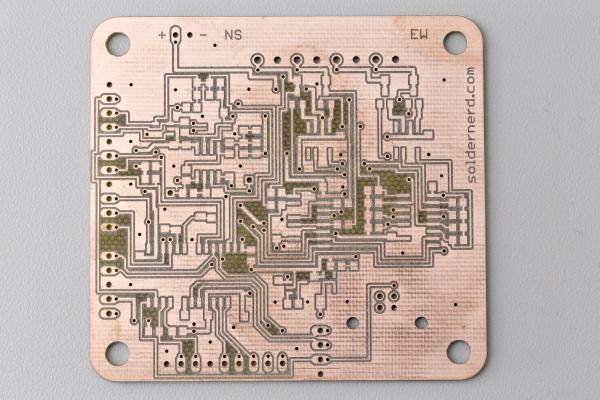
I recently ordered my first PCB at dirtypcbs.com and the result was promising. So there was nothing stopping me from finalizing the Rev B of my standalone Ultrasonic Anemometer and ordering a protopack. I’ve placed the order a few days ago and expect the boards to arrive here in 2 to 3 weeks. This should be good news for all those of you who have been asking for kits and want to contribute to the further developement of this project. I’ll build up one or two boards as soon as they get here and do some testing. If everything works as planned I can order some more components and ship some kits soon after that.
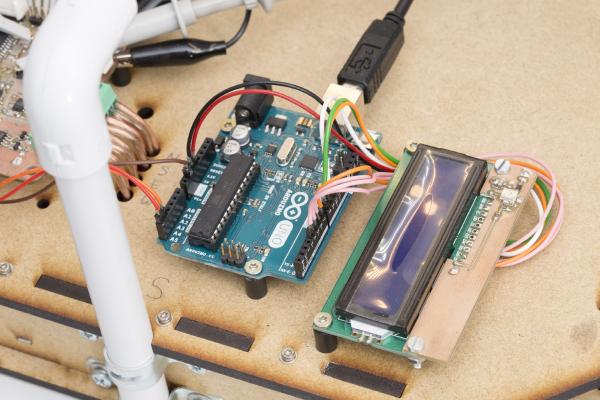
It’s been a long six weeks since my last post but that doesn’t mean that I haven’t done anything since. Among other things, I wrote some code to get the I2C interface working and hooked the anemometer up to an Arduino Uno with an LCD display attached. Apart from demonstrating the I2C interface this also nice for testing. For the first time I can see what this thing is measuring in real time without hooking it up to a PC over USB.
It’s been almost three weeks since my last post and some further progress has been made. I’ve upgraded the microcontroller and can now control the gain of the second amplifier stage in software. But let’s look at the changes in some more detail.
Last time I outlined my reasons to ‘go digital’ by adding a powerful on-board microcontroller and designing a standalone wind meter.
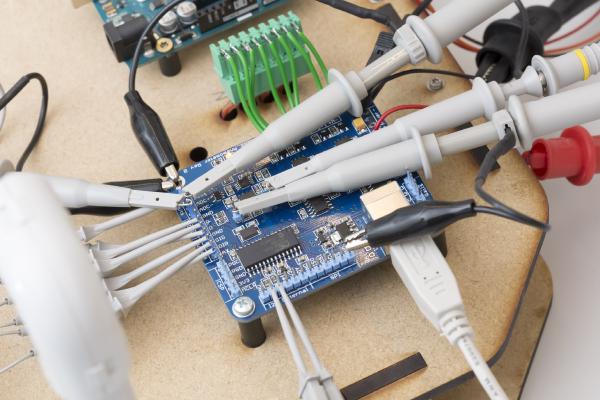
In the weeks that followed that decision I tried to find a suitable microcontroller and to design a prototype. Today I’ll show you the result of that work.
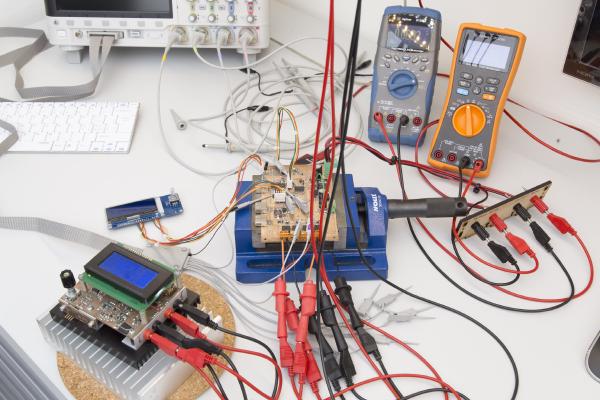
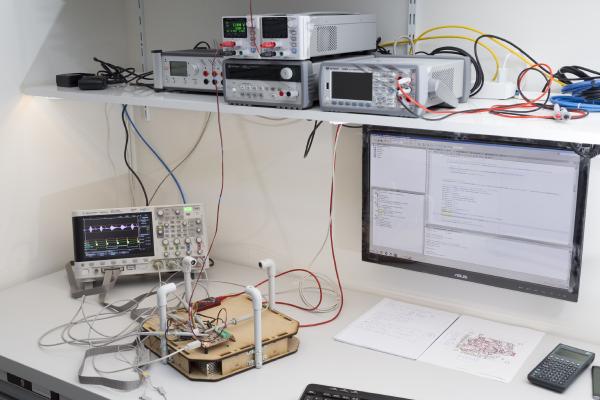
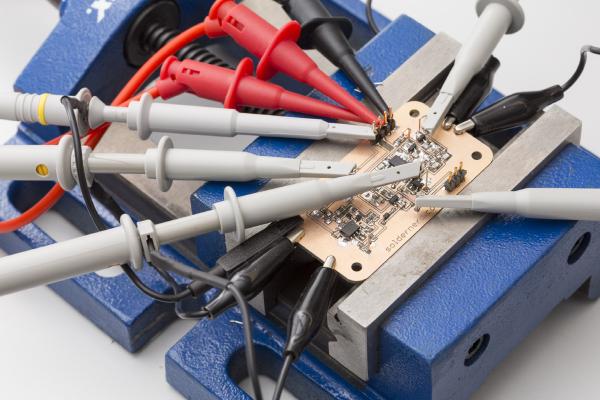
In my last post I went through the design of the analog part of the ultrasonic anemometer. Today we will see how the circuit designed last time performs in practice.