In late 2014 and early 2015 I had posted a short series on an inductance meter project. The first post in that series described an Arduino shield that allowed an Arduino UNO to do inductance measurements and got this blog mentioned on dangerousprototypes.com for the very first time.
Last time I outlined my reasons to ‘go digital’ by adding a powerful on-board microcontroller and designing a standalone wind meter.
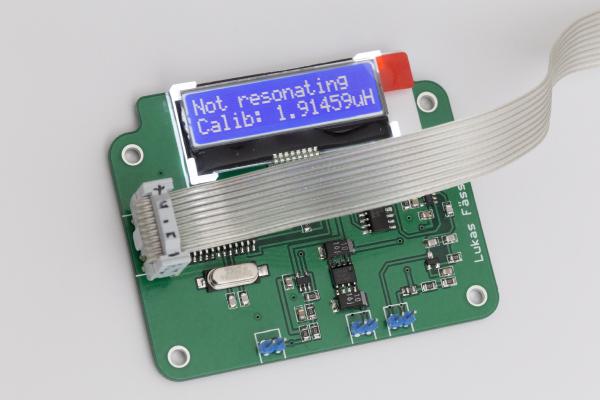
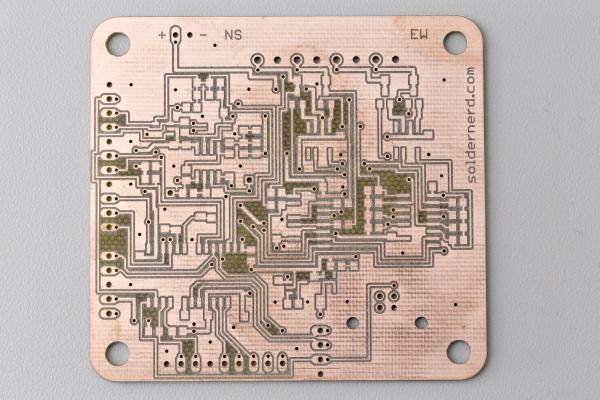
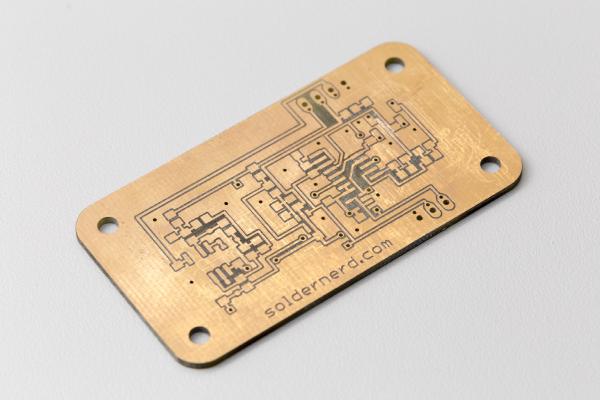
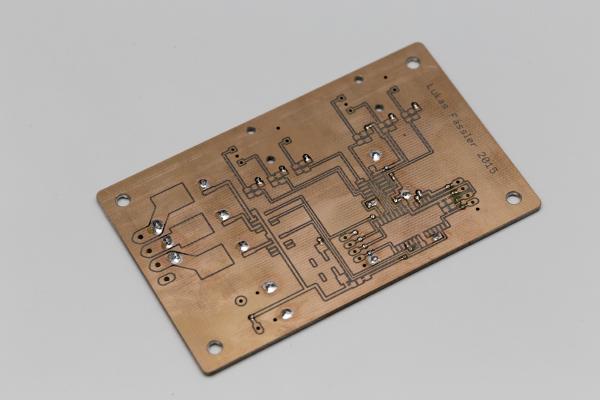
In the weeks that followed that decision I tried to find a suitable microcontroller and to design a prototype. Today I’ll show you the result of that work.
Recently, I’ve sucessfully tested the new driver ciruit for my ultrasonic anemometer. It performed even better than I expected and I will be happy to use it pretty much as it is.
Finished RGB dimmer In my last post I’ve described the design and construction of my LED dimmer project. This project here is similar but a bit more involved. It controls RGB LEDs so it can not only change the brightness but also the color of the light. Instead of a simple pot it used a pair of rotary encoders with push buttons. One controls the brightness, pushing its button turns the light on or off. The other changes the color, pushing its button toggles between color and white.
Finished 5V to 12V USB boost converter I frequently need a low-power supply to run a microcontroller system. Typically, one uses a lab power for such purposes. But at least on the desk where I do the programming I don’t have one. Since these systems typically consume little current it would be handy to be able to power them from USB. Most of my devices have on-board regulators so the voltage is rather uncritical. For 3.3 volt devices, the 5V from USB is just right. But others have a 5V regulator so they need a higher supply voltage. And even others might even need 12 volts.
In a recent post I’ve offered a free PCB on a first-come first-served basis. I’ll be happy to mail the board together with some components to Mumbai, India tomorrow. It goes to Parth Sane, a student, homebrewer and soon-to-be ham radio operator.