Let’s start with a video. It will tell you most of what I’m going to write about today.
I’m delighted to tell you that my MPPT Solar Charger has been nominated for this year’s Hackaday Prize Finals taking place on October 22nd. I’ve submitted it in the Power Harvesting Challenge (link no longer available) category a while ago and was just informed that it was picked as one out of twenty projects submitted to the finals. Check out the original article here. Of course, any support is highly appreciated.
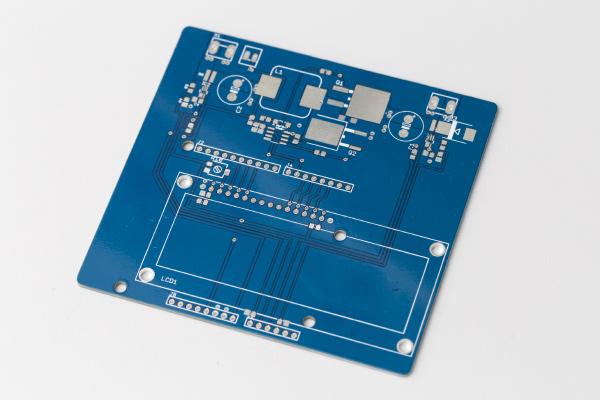
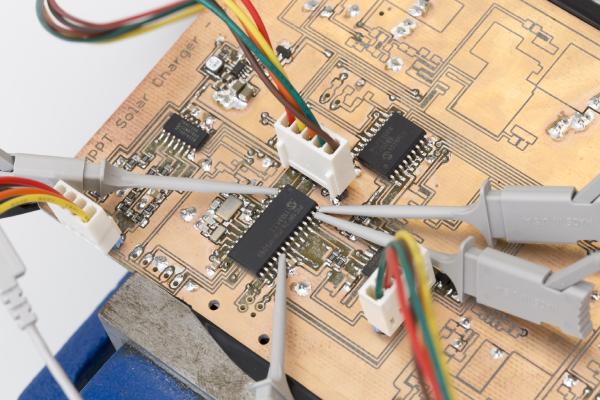
While the solar charger was originally intended to be used as a standalone device, it can just as well be integrated into other projects. In such applications, the user interface can be left away without sacrificing functionality other than the display and rotary encoder.
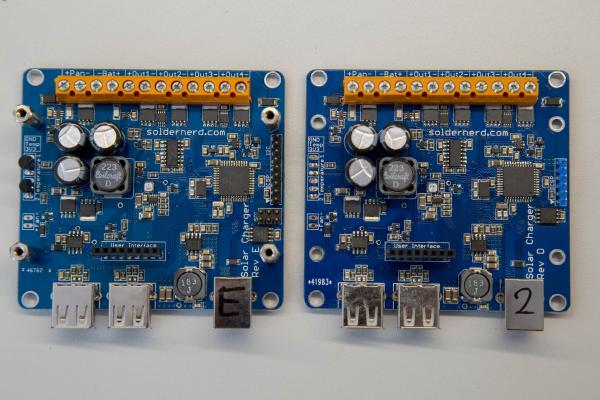
A reader of this blog was so kind to send me a number of surplus boards of two of my solar charger designs. Thank you, Joachim.
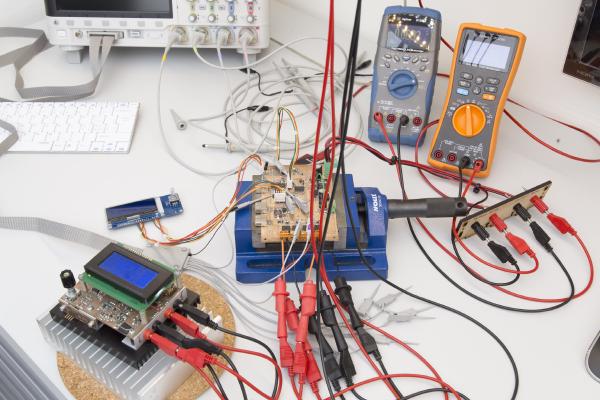
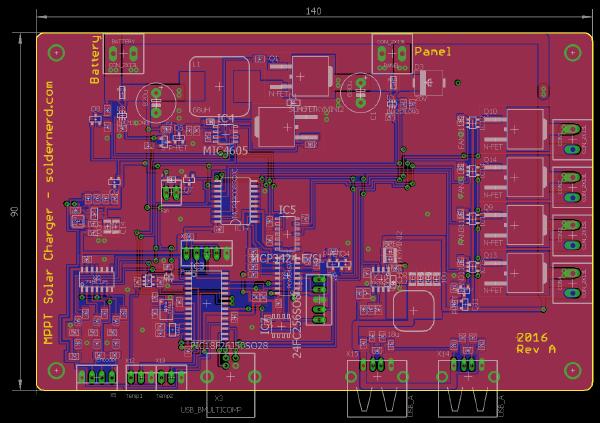
Over the last few weeks I have been quite busy with my MPPT Solar Charger project. I’ve built up a first board and started writing firmware for it. Since the last version was not too different in terms of hardware I was able to re-use most of that code. But I hadn’t even touched on the whole USB stuff back then so there was still a lot of work to do. While the project is still far from being complete I am happy to say that I’ve made quite some progress. Most importantly, the new design seems to work well and so far I haven’t found any mistakes in the board layout. But let’s go through this step by step.
Over the last year or so I’ve designed, built and tested a standalone solar charger. It performed quite well but as with any complex design there were a number of things that needed to be improved. So I eventually reached the point where I decided to design a revised version. And this is what this post is all about.
It’s time to follow up on the MPPT Solar Charger project. Progress has been slow since I’m currently working full time and doing a master’s degree at the same time. Given that this blog has previously been something close to a 50% job at times things will necessarily slow down a bit. But all the projects, including this one and the ultrasonic anemometer are alive and well and I’m working on them whenever I find some time.
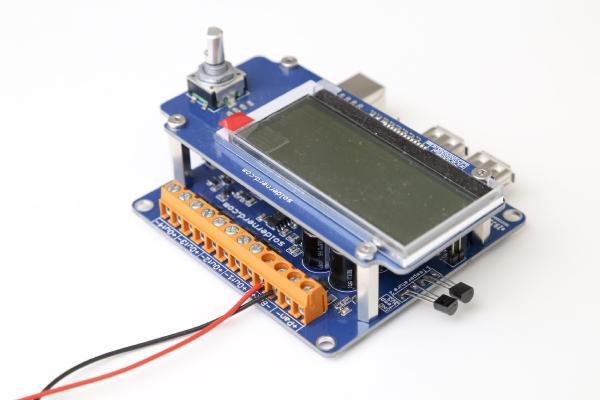
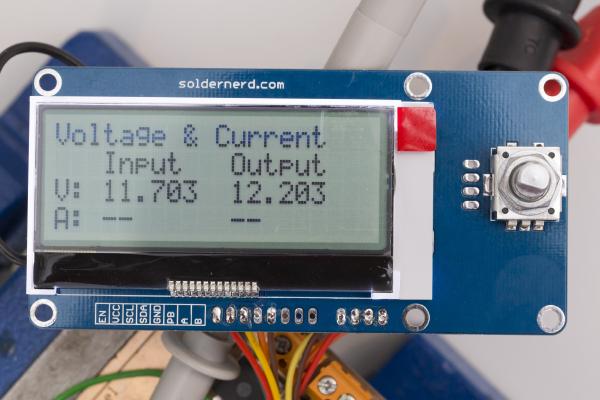
As you may have noticed I’m quite busy working on the MPPT Solar Charger project. The latest version uses a 4 lines x 20 characters LCD that connects via I2C as well as a rotary encoder with a push button.
In a previous post I have presented a design for an MPPT Solar Charger. In the mean time I have built a prototype and also wrote some software for it. So today I’ll go through my findings of what works well and what needs to be improved. And yes, there are some flaws in the design…
I’m currently waiting for the boards for my Ultrasonic Anemometer Rev B to arrive from Hong Kong and this gives me some time to write about the MPPT Solar Charger design that I did quite some time ago. I published a series of posts on a Arduino MPPT Solar Charger Shield and got a lot of encouraging feedback. But that shield was more of a proof-of-concept than a finished product. While it generally performed well it drew way too much current when idle to actually be deployed unless you can count on plenty of sunshine every day.