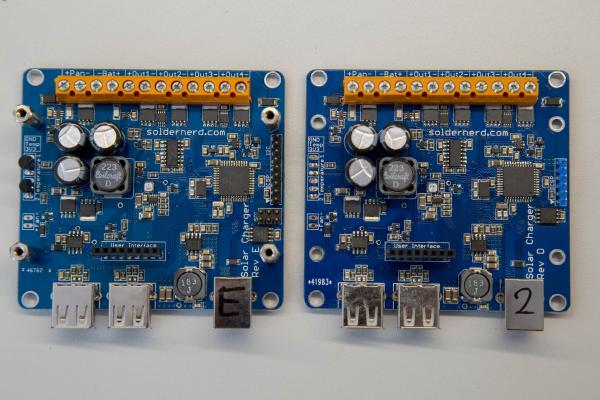
While the solar charger was originally intended to be used as a standalone device, it can just as well be integrated into other projects. In such applications, the user interface can be left away without sacrificing functionality other than the display and rotary encoder.
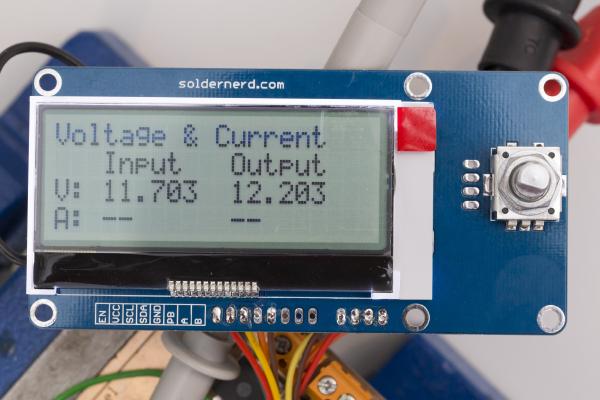
As you may have noticed I’m quite busy working on the MPPT Solar Charger project. The latest version uses a 4 lines x 20 characters LCD that connects via I2C as well as a rotary encoder with a push button.
While most of my microcontroller designs run on 3.3 volts there is still the ocasional 5 volt design. Or I do something with an Arduino. So the need may arise to interface between logic working at different voltage levels. There are several ways of doing this, depending on your needs. Things are relatively simple as long as you know in advance which side is transmitting and which side is receiving. It gets more difficult if the communication is bi-directional or with busses such as I2C that are bi-directional by nature. I did a search on farnell.com and identified two chips that can translate between almost any two voltage levels bi-directionally. The Texas Instruments TXB0106 works with up to 6 CMOS (i.e. actively driven high or low) signals for protocols such as SPI. The PCA9306 (also from TI) is intended for protocols such as I2C that rely on pull-up resistors and where a line must never be actively driven high.
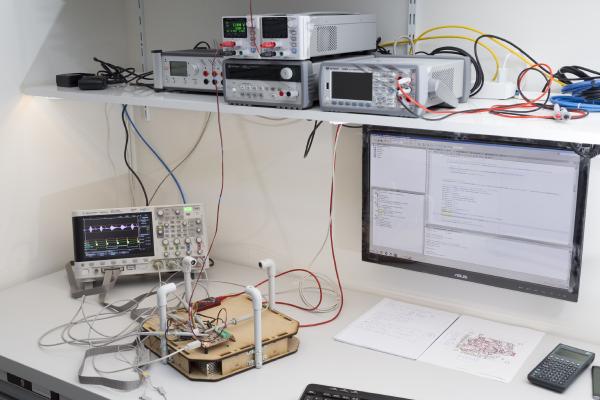
It’s been almost three weeks since my last post and some further progress has been made. I’ve upgraded the microcontroller and can now control the gain of the second amplifier stage in software. But let’s look at the changes in some more detail.