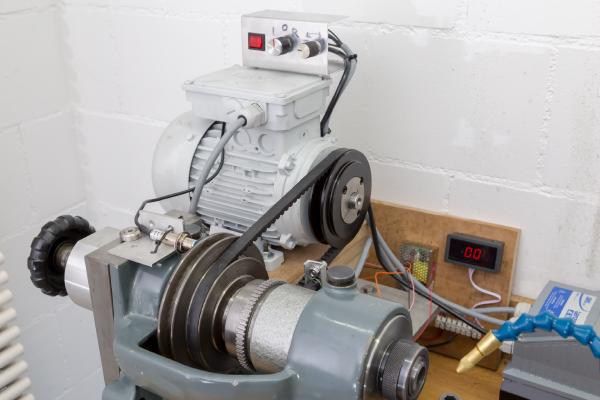
This post ist about the CNC conversion of a manual dividing head aka indexing head. If you’re not familiar with that kind of equipment, there’s a wiki page here. One makes use of interchangeable indexing plates and and the internal worm gear to accurately divide the circle. Parts like cogwheels and the like can be machined this way. A video of the finished project can be found here on my youtube cannel.
Let’s start with a video. It will tell you most of what I’m going to write about today.
I’m delighted to tell you that my MPPT Solar Charger has been nominated for this year’s Hackaday Prize Finals taking place on October 22nd. I’ve submitted it in the Power Harvesting Challenge (link no longer available) category a while ago and was just informed that it was picked as one out of twenty projects submitted to the finals. Check out the original article here. Of course, any support is highly appreciated.