This page serves as a directory of all my posts and downloads related to my Arduino based Ultrasonic Anemometer.
First Attempt with an ArduinoUno and two separate boards

- Part 1: /posts/arduino-ultrasonic-anemometer-part-1-getting-started/
- Part 2: /posts/arduino-ultrasonic-anemometer-part-2-digital-circuit/
- Part 3: /posts/arduino-ultrasonic-anemometer-part-3-analog-circuit/
- Part 4: /posts/arduino-ultrasonic-anemometer-part-4-testing-the-analog-board/
- Part 5: /posts/arduino-ultrasonic-anemometer-part-5-testing-the-digital-board/
- Part 6: /posts/arduino-ultrasonic-anemometer-part-6-mechanical-design/
- Part 7: /posts/arduino-ultrasonic-anemometer-part-7-basic-software/
- Part 8: /posts/arduino-ultrasonic-anemometer-part-8-more-software/
Ultrasonic Anemometer Shield for ArduinoUno
- Part 9: /posts/arduino-ultrasonic-anemometer-part-9-a-new-hardware/
- Part 10: /posts/arduino-ultrasonic-anemometer-part-10-arduino-shield-ready/
- Part 11: /posts/arduino-ultrasonic-anemometer-part-11-testing-the-new-hardware/
- Part 12: /posts/arduino-ultrasonic-anemometer-part-12-working-on-an-arduino-library//
- Part 13: /posts/arduino-ultrasonic-anemometer-part-13-arduino-library-finally-ready/
- Part 14: /posts/arduino-ultrasionic-anemometer-part-14-wind-tunnel-testing/
Trying out new ideas
- Part 15: /posts/ultrasonic-anemometer-part-15-a-new-attempt/
- Part 16: /posts/ultrasonic-anemometer-part-16-testing-the-new-driver-circuit/
- Part 17: /posts/ultrasonic-anemometer-part-17-lasercut-mechanical-design/
- Part 18: /posts/ultrasonic-anemometer-part-18-analog-signal-processing/
- Part 19: /posts/ultrasonic-anemometer-part-19-testing-the-analog-circuit/
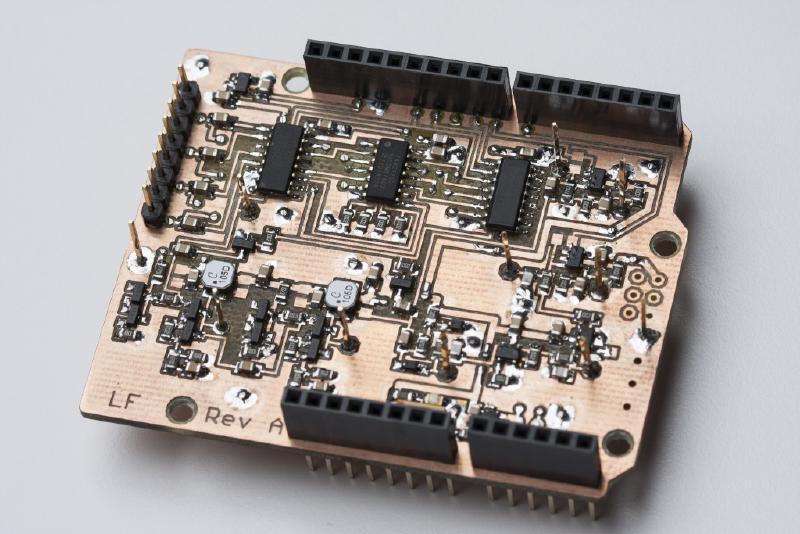
Standalone Ultrasonic Anemometer with an on-board PIC32
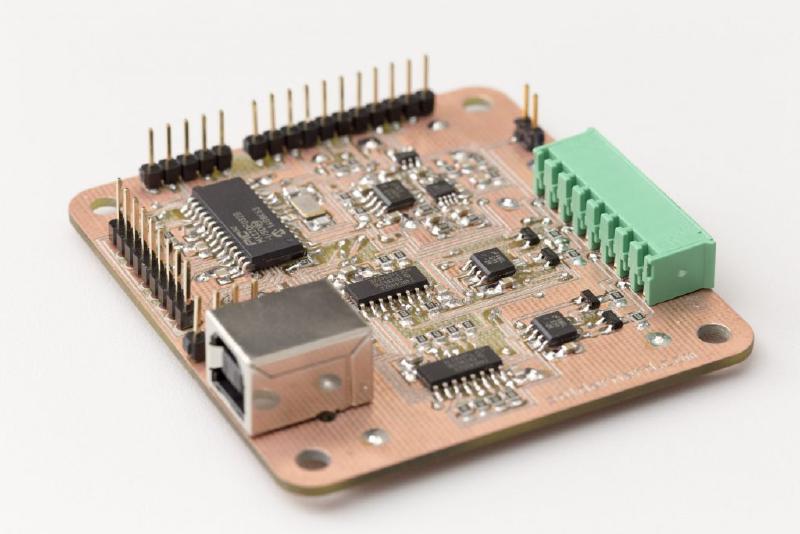
- Part 20: /posts/ultrasonic-anemometer-part-20-standalone-anemometer-design/
- Part 21: /posts/ultrasonic-anemometer-part-21-standalone-anemometer-hardware/
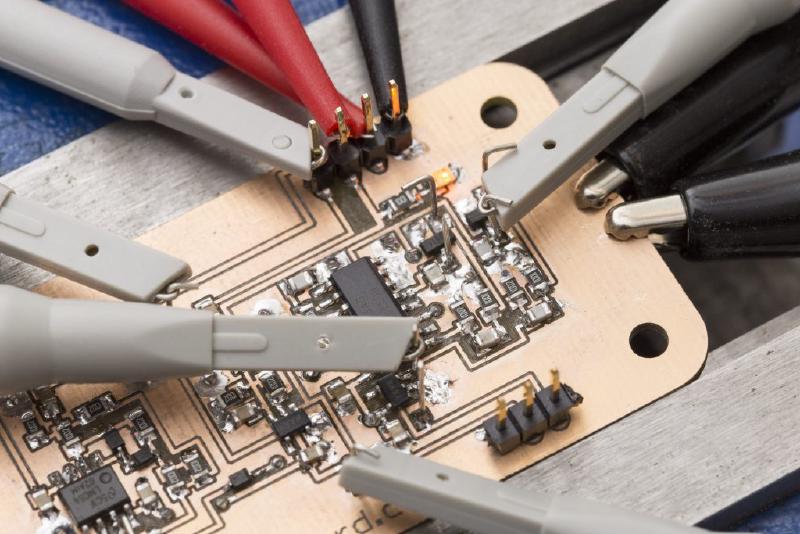
- Part 22: /posts/ultrasonic-anemometer-part-22-usb-up-and-running/
- Part 23: /posts/ultrasonic-anemometer-part-23-first-successful-measurements/
- Part 24: /posts/ultrasonic-anemometer-part-24-new-microcontroller-and-software-controlled-gain/
- Part 25: /posts/ultrasonic-anemometer-part-25-i2c-interfacing-and-more/
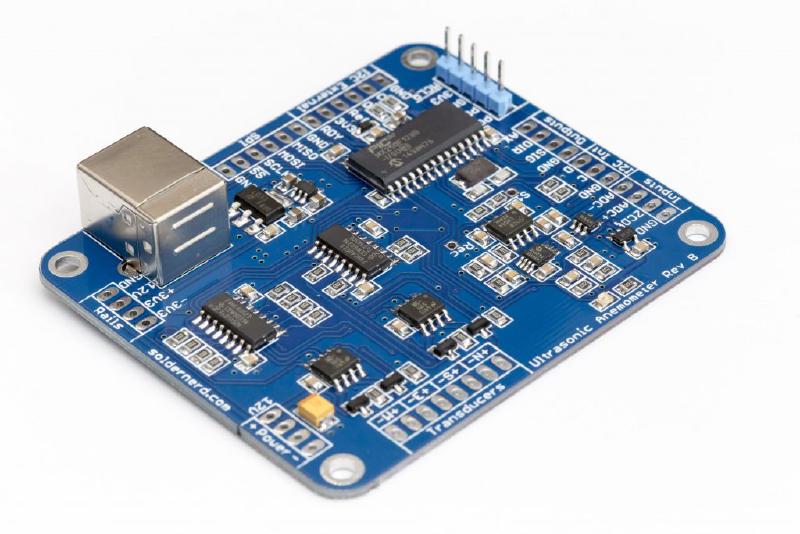
Revised Version on a professionally made PCB
- Part 26: Ultrasonic Anemometer Part 26: Rev B Board ordered
- Part 27: /posts/ultrasonic-anemometer-part-27-ready-to-take-pre-orders/
- Part 28: /posts/ultrasonic-anemometer-part-28-new-hardware-tested/
- Part 29: /posts/ultrasonic-anemometer-part-29-transducer-comparison/
- Part 30: /posts/ultrasonic-anemometer-part-30-downsized-hardware/
Downloads:
- All Eagle files for download as a .zip file: AnemometerEagle (file no longer available)
- Arduino Sketch: Anemometer_Uno_01 (file no longer available)
- Anemometer Arduino Shield PDFs and Eagle files as a .zip: AnemometerShield_REV1
- Anemometer Library v1.0: AnemometerLibrary_10 (file no longer available)
- Anemometer Arduino Shield PDFs and Eagle files Rev2 as a .zip: AnemometerShield_REV2 (file no longer available)
- Eagle files and PDFs for the driver circuit of my new attempt: AnamometerDriver_RevA (file no longer available)
- OpenSCAD CAD model as well as PDFs and Adobe Illustrator files for the lasercut mechanical design: AnemometerOpenSCAD (file no longer available)
- Analog signal processing. Eagle files as well as PDFs: AnemometerAnalog (file no longer available)
- Standalone anemometer. Eagle files as well as PDFs: StandaloneAnemometer_RevA (file no longer available)
- Standalone anemometer: USB and basic send/receive working: StandaloneAnemometer_01_20160528 (file no longer available)
- Measuring time-of-flight, calculating wind speed. zip file includes sample data logs: StandaloneAnemometer_01_20160606 (file no longer available)
- Upgrade to PIC32MX250, controlling digipot over I2C: StandaloneAnemometer_01_20160625 (file no longer available)
- Standalone Anemometer interfacing to an Arduino Uno via I2C: StandaloneAnemometer_01_20160710_I2CExternal (file no longer available)
- Code for the Arduino Uno with the LCD: I2C_Master_LCD (file no longer available)
- Eagle files and PDFs of schematic and board for the standalone anemometer Rev B: standaloneanemometer_revb (file no longer available)
- The Gerber files for the standalone anemometer Rev B as ordered from dirtypcbs.com: dirtypcb_StandaloneAnemometer_RevB_ordered (file no longer available)
- Bill of materials (BOM) for the standalone anemometer Rev B: StandaloneAnemometer_RevB_BOM (file no longer available)
GitHub
Now the source code for the Ultrasonic Anemometer is available on GitHub: github.com/soldernerd/UltrasonicAnemometer
And the board and schematics: github.com/soldernerd/UltrasonicAnemometerHardware
And the OpenSCAD design for the lasercut structure: github.com/soldernerd/AnemometerLasercut