I recently ordered my first PCB at dirtypcbs.com and the result was promising. So there was nothing stopping me from finalizing the Rev B of my standalone Ultrasonic Anemometer and ordering a protopack. I’ve placed the order a few days ago and expect the boards to arrive here in 2 to 3 weeks. This should be good news for all those of you who have been asking for kits and want to contribute to the further developement of this project. I’ll build up one or two boards as soon as they get here and do some testing. If everything works as planned I can order some more components and ship some kits soon after that.
So today I’ll go through the changes I’ve made compared to the previous version. All in all the changes are quite minor and only require minimal changes in software. But let’s go through them one by one.
Non-volatile memory
This is the biggest change from a functional point of view. The PIC32MX250 doesn’t have any EEPROM memory of its own. So in order to be able to save some settings an the like I’ve added a Microchip 24AA16 I2C EEPROM providing 16kbit (2kB) of non-volatile memory. That should be more than enough to store any settings and calibrations one might want to make. For example, this gives the user the possibility to calibrate the filter kernels to the transducers used. Of course, the software first needs to make use of that memory but I think it’s great to have the possibility to durably store a reasonably large amount of data.
Support for 5V I2C communication
I’ve hinted at this in a previous post. On the Rev A board the I2C signals were pulled up to the 3.3 volt rail. This was great as long as one didn’t want to interface to a 5V device such as an Arduino. The microcontroller pins are 5V compatible so you want to be able to pull those lines up to 5V whenever you interface to a 5V device. So I’ve added a diode to allow the SDA and SCL lines to be pulled higher than 3.3 volts. The I2C reference voltage of 3.3 volts minus a schottky diode drop or about 3.1 volts is accessible from the I2C header at the bottom. So just connect that to the external device’s 5V operating voltage and you have a fully compliant 5V I2C bus.
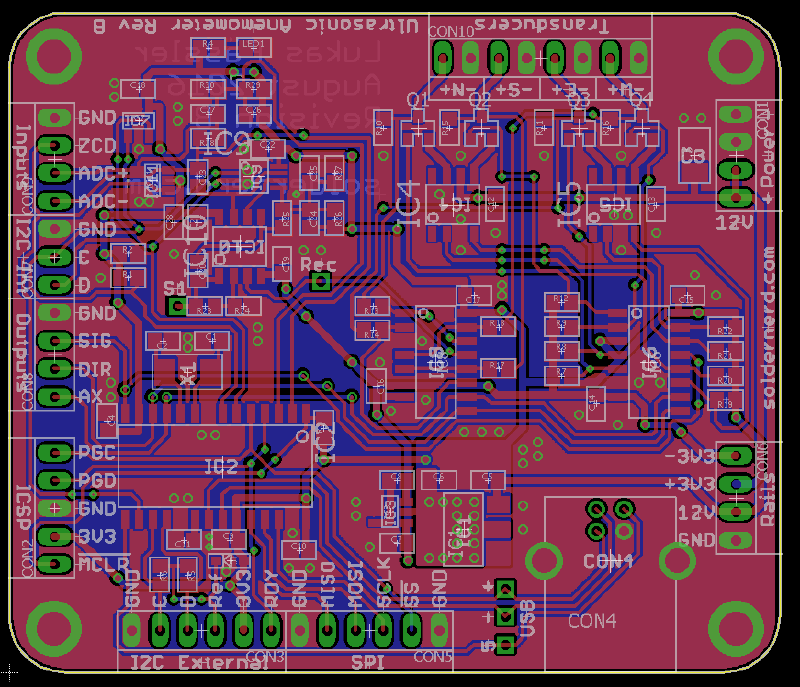
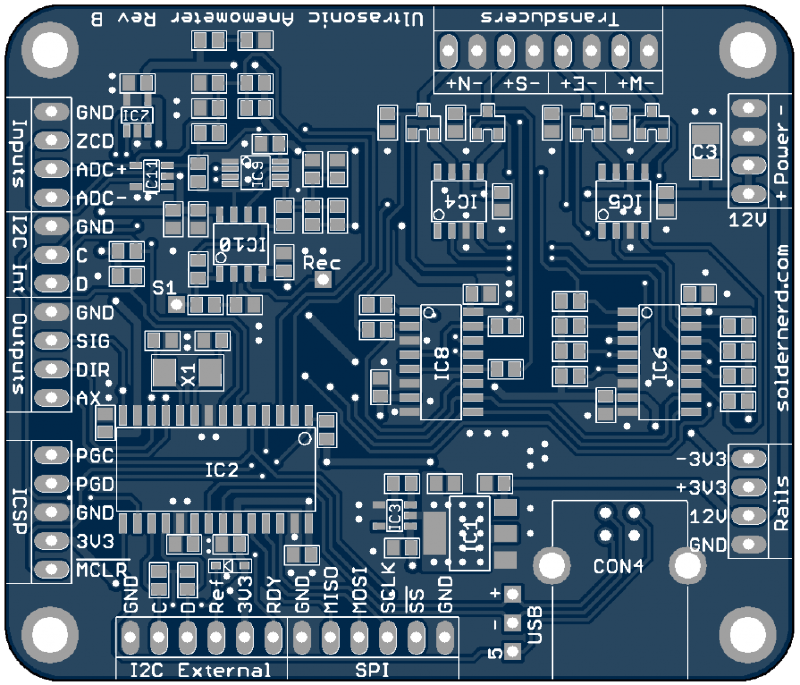
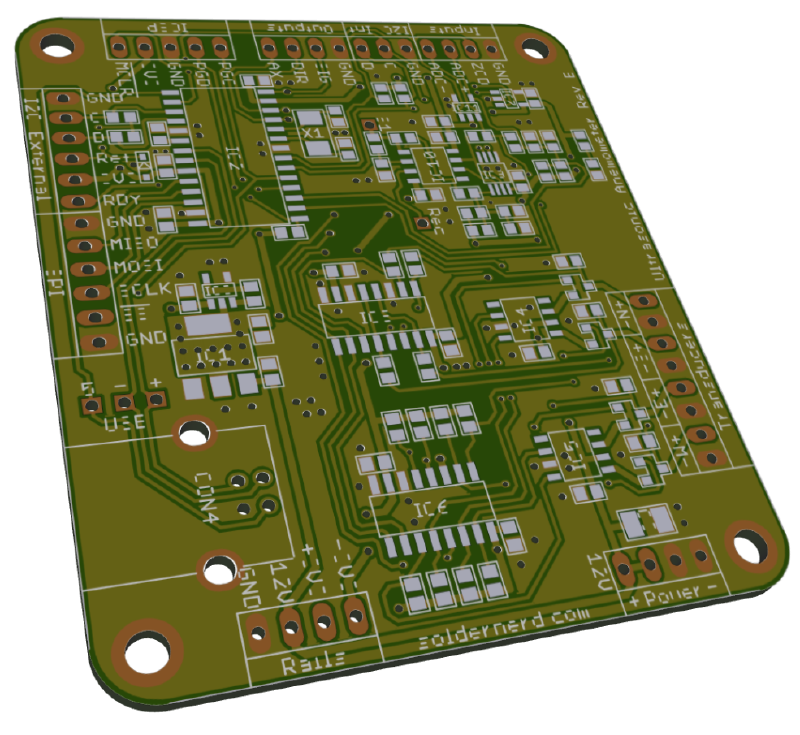
Physical layout and connectors
There was a rather large 8-pin connector on the last version to connect to the transducers. Now all the connectors along the edges of the board are standard 100-mil headers. This also allowed me to slightly shrink the physical size of the board to 60x70mm.
The pinout has also slightly changed. The board is now powered from a header on the right-upper side and all three voltage rails are now externally accessible from a newly added header on the right side. The pin order on the I2C and SPI headers on the bottom side of the board has changed, mainly to accomodate an exteral I2C reference voltage.
Power supply
The tiny (SOT23-5) 3.3 volt linear regulator on the last version worked well but got rather hot when providing close to 50mA from a 12V input voltage. I never had any issues with it at room temperature but decided to be cautious and upgrade to a LD1117 regulator in a much larger SOT223 package. This should be more than sufficient any reasonable ambient temperature..
Miscellaneous changes
I changed the digipot used to set the amplifier gain to a Microchip MCP4531. This model only has 128 steps but this is still more than sufficient for its task and it’s quite a bit cheaper than the 256-step version.
I also had to change the crystal because the model previously used became unavailable.

That’s it for now. I’ll let you know as soon as the boards get here.