Last time I outlined my reasons to ‘go digital’ by adding a powerful on-board microcontroller and designing a standalone wind meter.
In the weeks that followed that decision I tried to find a suitable microcontroller and to design a prototype. Today I’ll show you the result of that work.

I looked at various series of microcontrollers from different manufacturers and finally decided to go for the Microchip PIC32 series. It offers everything I could possibly ask for: 32 bit architecture, inexpensive, vectored interrupts, integer division, any interface you want (depending on the model of course) , available in large, low pin count, hobbyist friendly packages and so on.
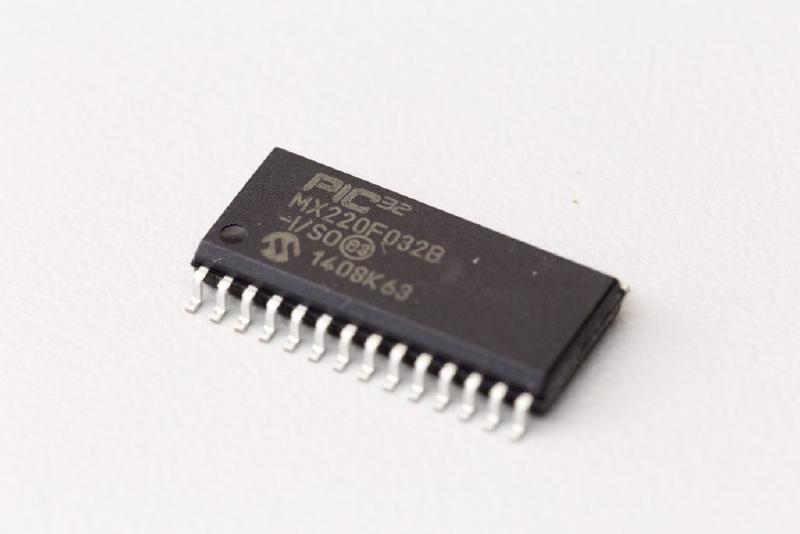
As you can see above, the model chosen for my prototype is a PIC32MX220. This is low to mid-end representative of this series but even so the specs are quite impressive. CPU clock up to 50MHz, one instruction per clock cycle, full-speed USB 2.0, 32kB flash, 8kB RAM and all of that in a SOIC28 package at a price of CHF 3.58 in single quantities.

After having chosen a chip the next task was to come up with an actual design. I took my anemometer driver design and tried to integrated the new PIC32. That driver circuit had performed extraordinary well so I changed very little. I left away the RELEASE signal since my tests had shown it to be unnecessary. I also replaced the LM5111-1M mosfet drivers by LM5111-2M. The difference is that the 2M is inverting while the 1M is not. The reason for changing this is because the 2M is available at a significantly lower price of CHF 1.35 vs CHF 2.25. Not a big deal if you just build a single prototype but I thought it might be smart to change this anyway. This also required some resistors to be changed from pull-downs to pull-ups. Except these details everything stayed the same with the drive circuit.

I also had to re-design the power supply since the PIC needs a 3.3 volt rail as opposed to 5 volts in the driver test circuit. Since I had to re-design it anyway I also downsized the power supply somewhat. I’ve otherwise resisted all temptations to use smaller components but the power supply was just a bit too big with the two SOIC8 chips and four size C tantalum caps.
The prototype now uses an MCP1755 linear 3.3V regulator in a SOT23-5 package with a 33uF size B tantalum cap at its input and a 10uF 0805 size ceramic cap at the output. A TCM829 (also in a SOT23-5 package) and two more 10uF caps produce the -3.3 volts output. So there is a total of three supply rails: +12V, +3.3V and -3.3V.
A major challenge was to make do with the very limited number of I/O pins on the PIC. 28 pins seem like a lot for the task at hand but plenty of them are already used for things like supply voltages and the like.
In the end I managed to still get three independent interfaces to the outside world: USB 2.0, I2C and SPI. All these interfaces as well as just about any other signal of interest is easily accessible from one of the numerous 100mil headers along the edges of the board.

The amplifier still uses a LMC6482 dual op amp , now running on a+/- 3.3 volt supply. The first stage amplifies the ground-referenced input signal by a fixed factor (currently 11 but this might change). The output signal is then biased to 1.65 volts and amplified once again. This time the gain can be adjusted digitally via a MCP4561 I2C digipot.

Before I forget: The PIC gets its system clock from a 8MHz crystal. That might seem low but there are two (variable) PLLs inside the PIC that (together with a number of pre- and post-scalers) let us produce the 48Mhz signal needed for USB as well as a reasonable clock speed to run the CPU and peripheral bus on (probably also 48MHz but we’ll see).
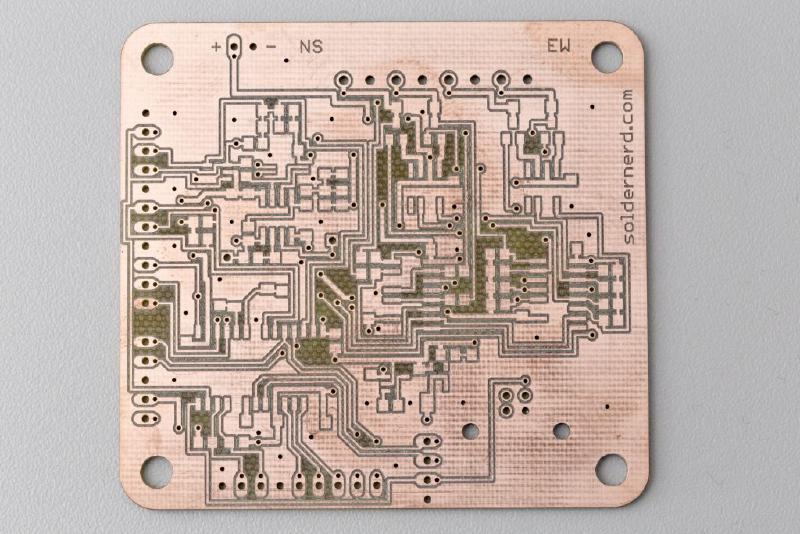
The board layout proved to be a bit tricky because there isn’t that much space on the board and I had quite clear ideas where I wanted certain headers to be. So I was more than happy when all the traces were finally laid out.
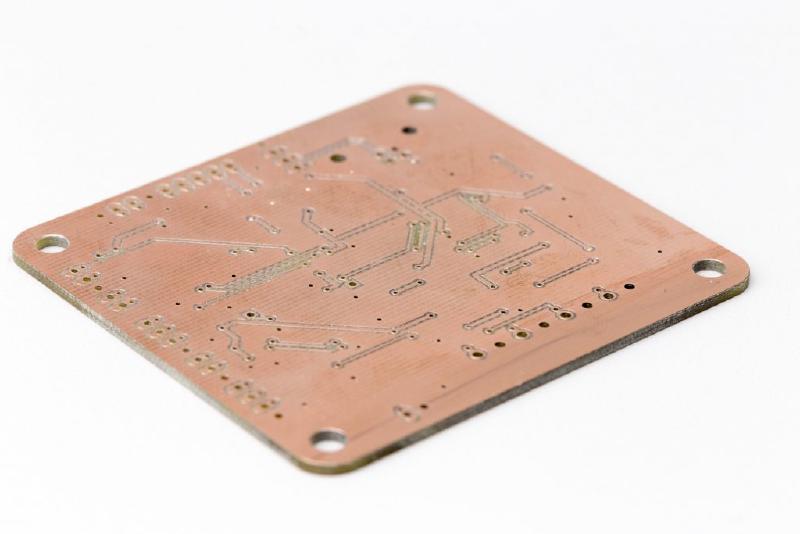
As you can see, the PCB is already milled and the vias soldered. I can’t wait to build this thing up and start to do some programming. That will be the topic of my next post.

As always, a zip file with the eagle files and PDFs of the schematic and board layout can be found on the overivew page.
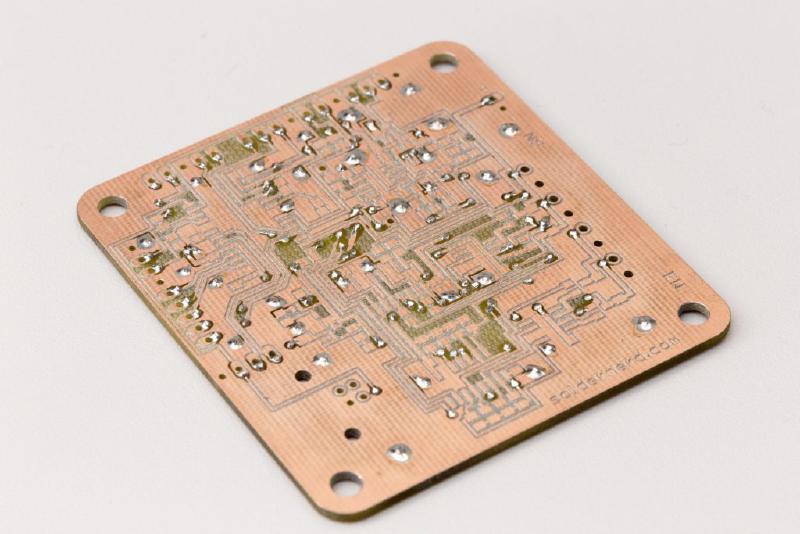
And here’s the finished board.