Recent

Tripet MHP 500 Part 3: Table Off, Hydraulic Cylinders and a Z-axis Mishap
Part 3 of my Tripet MHP 500 restoration series. In Part 2 I got the electrics sorted and the spindle rebuilt. This time it was table off, cross-slide out, and a proper look at what’s underneath. Overview page: /projects/tripet-mhp-500/.

Tripet MHP 500 Part 2: Electrics, Spindle Rebuild and First Sparks
Part 2 of my Tripet MHP 500 restoration series. In Part 1 I picked up the machine and got as far as tripping the RCD on first power-on. The overview for the series is at /projects/tripet-mhp-500/.

Tripet MHP 500 Part 1: Acquisition and First Look
This is the first of a series of probably four posts about the restoration of a Tripet MHP 500 surface grinder. The series came together a bit on the fly so the writeup is lagging behind the actual work. Everything shown here is already done and the machine is up and running.
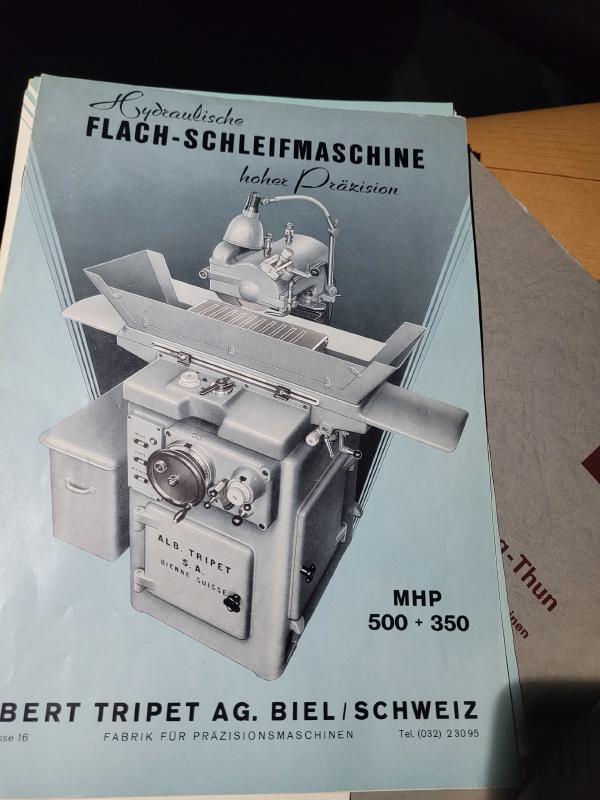
Tripet MHP 500 Surface Grinder
This page is a short overview of my posts on a 1963 Tripet MHP 500 surface grinder that I picked up and put back to work. The Tripet is a compact, Swiss-built grinder. Mine originally came from the Werkzeugmaschinen-Laboratorium at ETH Zürich and now lives in my workshop.
The Blog is Back
It’s been a while. The blog has been sitting there, largely unchanged, collecting dust and serving ads to anyone who happened to stumble across it. So I decided it was time for an overhaul.
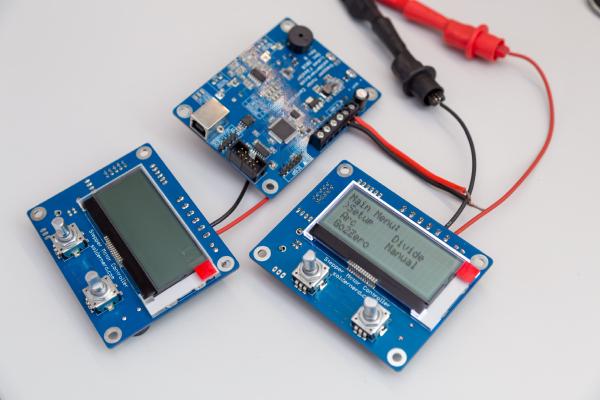
Stepper Motor Controller Rev B
Looks almost like the first version
This board may look familiar to some of you. Because at first glance, it looks just like its older brother described here: Dividing Head Controller. But many things have been improved in Revision B.
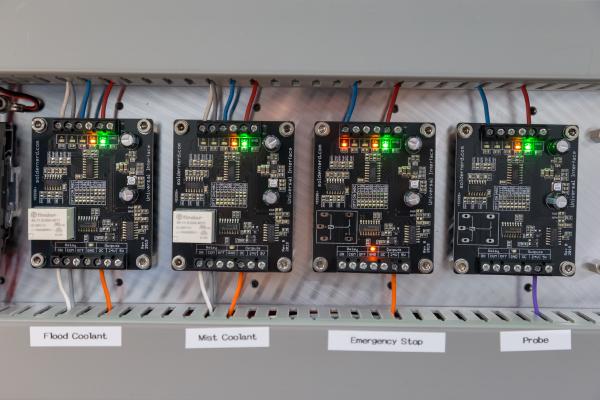
Universal Interface
The Universal Interface
It’s time to present a relatively simple yet useful device: the Universal Interface. The need for this little helper arised when building the control for my CNC milling machine. But that’s a major project that I will introduce another time. Today it’s only about this little board.
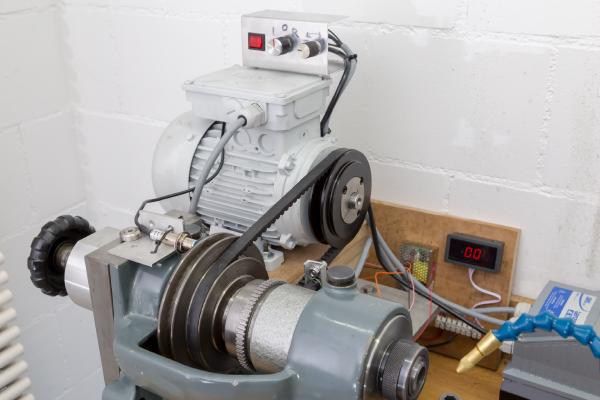
Variable-Frequency Drive
I’ve just finished the variable-frequency drive (VFD) for my 1970s Schaublin 102 lathe. Before I dig into details, there’s a youtube video here: